Philosophical vision of the problem
The meaning of life is related to the question “What to live for”, and not to the question of how to maintain life. A person's attitude is...
1.1 Calculation of tolerances and fits of smooth cylindrical mates
1.2 Gauges for the control of smooth cylindrical joints
2. Calculation and selection of rolling bearing fits
3. Roughness, deviation of shape and location of surfaces
4. Tolerances and fits of keyed and splined connections
4.1 Keyed connection
4.2 Straight spline connection
4.3 Involute spline connection
Literature
1. Smooth mates and calibers
1. The specified landing is Æ56H6/k5.
Transitional landing.
Limit deviations of hole Æ56H6: upper ES=+19 µm; lower EI=0.
Maximum shaft deviations Æ56k5: upper es=14 µm; lower ei=+1 µm.
Dmax = D + ES = 56 + 0.019 = 56.019 mm;
Dmin = D + EI = 56 + 0 = 56 mm;
dmax = d + es = 56 +0.014 = 56.014 mm;
dmin = d + ei = 56 + 0.001 = 56.001 mm;
TD = IT6 = 19 µm;
Td = IT5 = 13 µm;
Smax = ES - ei = 19- 1 = 18 µm;
Smin = EI - es = 0 - 14 = -14 µm;
TS = Smax - Smin = 18 + 14 = 32 µm.
Check: TS = Td+TD 32= 19 + 13
2. The specified landing is Æ70S6/h7.
Landing with clearance.
Limit deviations of hole Æ70S6: upper ES=-59 µm; lower EI=-78.
Maximum shaft deviations Æ70h7: upper es=0 µm; lower ei=-30 µm.
Limit dimensions of hole and shaft:
Dmax = D + ES = 70 + (-0.059) = 69.941 mm;
Dmin = D + EI = 70 + (-78) = 69.922 mm;
dmax = d + es = 70 + 0 = 70 mm;
dmin = d + ei = 70 + (0.030) = 69.970 mm;
Hole and shaft dimensional tolerances:
TD = IT6 = 19 µm;
Td = IT7 = 30 µm;
Fit parameters (with clearance).
Nmax = dmax - Dmin = -0.078 mm;
Nmin = dmin - Dmax = -0.029 mm;
TN = Nmax - Nmin = -0.0678 + 0.029 = -0.049 mm.
Check: TN = Td+TD 0.049 = 0.019 + 0.030
3. The landing is Æ105F7/h7.
Landing with clearance.
Limit deviations of hole Æ53H7: upper ES=+30 µm; lower EI=0.
Maximum shaft deviations Æ53k5: upper es=+15 µm; lower ei=+2 µm.
Limit dimensions of hole and shaft:
Dmax = D + ES = 53 + 0.030 = 53.030 mm;
Dmin = D + EI = 53 + 0 = 53 mm;
dmax = d + es = 53 + 0.015 = 53.015 mm;
dmin = d + ei = 53 + 0.002 = 53.002 mm;
Hole and shaft dimensional tolerances:
TD = IT7 = 30 µm;
Td = IT5 = 13 µm;
Landing parameters (transitional).
Smax = Dmax - dmin = 53.030 - 53.002 = 0.028 mm;
Nmax = dmax - Dmin = 53.015 - 53 = 0.015 mm;
Smin = -Nmax = -0.015 mm;
Nmin = -Smax = -0.028 mm;
TS(N) = Smax + Nmax = 0.028 - 0.015 = 0.043 mm.
Check: TS(N) = Td+TD 0.043 = 0.013 + 0.030
4. The landing is set to Æ21H8/h7.
Landing with clearance.
Limit deviations of hole Æ21H8: upper ES=+33 µm; lower EI=0.
Maximum shaft deviations Æ21h7: upper es=0 µm; lower ei=-21 µm.
Limit dimensions of hole and shaft:
Dmax = D + ES = 21 + 0.033 = 21.033 mm;
Dmin = D + EI = 21 + 0 = 21 mm;
dmax = d + es = 21 + 0 = 21 mm;
dmin = d + ei = 21 + (-0.021) = 20.979 mm;
Hole and shaft dimensional tolerances:
TD = IT8 = 33 µm;
Td = IT7 = 21 µm;
Landing parameters (with clearance).
Smax = Dmax - dmin = 21.033 - 20.979 = 0.054 mm;
Smin = Dmin - dmax = 21 - 21 = 0;
TS = Smax - Smin = 0.054 - 0 = 0.054 mm.
Check: TS = Td+TD 0.054 = 0.021 + 0.033
We enter the obtained data for all landings in Table 1.1.
Table 1.1 Types and parameters of plantings
| Designation Landing | Limit dimensions | Limit dimensions | Fit type | Fit tolerance | ||||||
| Holes | Vala | gap | interference | |||||||
| Æ19H9/c8 | 19,052 | 19 | 18,890 | 18,857 | 0,195 | 0,110 | - | - | gap | 0,085 |
| Æ34H7/s7 | 34,025 | 34 | 34,068 | 34,043 | - | - | 0,068 | 0,018 | interference | 0,050 |
| Æ53H7/k5 | 53,030 | 53 | 53,015 | 53,002 | 0,028 | -0,015 | 0,015 | -0,028 | transitional | 0,043 |
| Æ21H8/h7 | 21,033 | 21 | 21 | 20,979 | 0,054 | 0 | - | - | gap | 0,054 |
Students, graduate students, young scientists who use the knowledge base in their studies and work will be very grateful to you.
Federal Agency for Education
Siberian State Aerospaceuniversitythem. Academician M.F.Reshetnyova
Department of UKS
Coursework for the course
« Standardization of accuracy in mechanical engineering»
Option No. 14
Completed: student
Checked by the teacher:
Krevina T.E.
Krasnoyarsk 2008
Mechanical engineering is the most important leading industry. But mechanical engineering plays an equally important role in other areas such as science, culture, education, public utilities and housing. Humanity is growing and developing, thereby providing food for the development of mechanical engineering and the expansion of its range. The main emphasis these days is on electrification, as well as mechanization and automation of production and labor; in general, everything is done to facilitate human physical labor.
Nominal connection diameter, mm……………………………..75;
Maximum ultimate tension N max p, µm………………………80;
Minimum limit tension N min p , µm………………………..60.
The calculated nominal diameter d = 75 mm corresponds to the Ra40 series and there is no need to round it.
We determine the average tightness of the limiting tightnesses given in the problem:
where N max p and N min p are the calculated maximum tensions given in the problem, µm.
Based on the average interference, we select the fit in any system (shaft system or hole system) according to Table 5 and write out the table interferences N max T = 72 µm and N min T = 40 µm for the selected fit.
where N max T and N min T are the tabulated maximum tensions, µm.
The tabulated average interference is close to the calculated one and the fit in the hole system corresponds to it
We find deviations for the tolerance fields of the hole and shaft according to tables 6,9,14.
We write down the combined designation of landing with deviations
We build a diagram of the location of the tolerance fields of the selected fit. We indicate the tension. Deviations in the tolerance diagram are indicated in micrometers.
Fig.1 . Tolerance fields for interference fit
We calculate the maximum and minimum interference (check) for the selected fit, according to the tolerance zone diagram using the formulas:
Where ES, es, EI, ei- upper and lower deviations of the hole and shaft, respectively.
The resulting maximum interference fits coincide with the tabulated maximum interference.
Determine the shaft tolerance and hole tolerance:
The fit is chosen so that if the tolerances of the shaft and hole are unequal, the hole has a larger tolerance.
Rice. 2 . Connection sketch
TN = TD+Td = N max -N min = 72-40=32
The connection is not guaranteed to remain stable under load.
Rice. 3 . Tolerance fields for transitional fit
5) Full landing designation:
6) Transitional fit tolerance:
T(S,N) = TD + Td
T(S,N) = (-0.008-(-0.037))+(0-(-0.02)) = 0.029+0.02 = 0.049 µm
7) The hole tolerance is greater than the shaft tolerance, which means the hole is made less accurately than the shaft.
9) Calculations for constructing a Gaussian curve:
a) standard deviation of landing:
b) zone of dispersion of interference gaps and maximum ordinate:
c) relative deviation:
actual ordinate deviation with zero clearance
d) probable number of mates with a gap:
e) probable number of interference fits:
10) Gaussian curve:
Along the y-axis we plot the number of mates, i.e. number of landings.
Along the x-axis is the dispersion of gaps or interference. On this curve, the landing grouping center corresponds to the landing center N avg.
Rice. 4 . Gauss curve
On distance X=12.5 µm from the grouping center there is an ordinate corresponding to zero interference (gap). Let us agree to count this ordinate to the left of the grouping center when the transition fit has an average gap and to the right when there is interference. The entire area under the curve limited along the ordinate by the scattering interval R, corresponds to the total number of mates of a given fit, i.e. the probability is from 1 to 100%. The probability of occurrence of mates with interference corresponds to the shaded area on the left, and with a gap - to the shaded area on the right.
Since the body will not rotate.
14) Sketch of the housing and shaft for a rolling bearing:
Determine the type of centering, accuracy and nature of mating for a spline connection.
Construct a diagram of the location of tolerance fields indicating deviations, determine the maximum dimensions of all mating elements.
1) Number of splines Z =10, internal diameter d =72, external diameter D =82
2) Tooth (slot) width b=12mm, smallest internal diameter d 1 = 67.4mm, series - average.
3) Type of centering: centering along b (side surfaces of the teeth)
4) According to the table. 3.1 we are looking for a fit for the centering parameter b .
Since the connection is movable, we choose a fit with a gap
5) For non-centering diameters d and D select plantings 5, according to the table. 3.4.] For D - , for inner diameter d: for bushing H 11, and for the shaft we find the tolerance d - d 1.
6). Let's find deviations for all parameters using table. 6, 7, 12.
For N 12ES = +350µm ; EI= 0 (D=82 mm)
ForN 11 ES =+ 190µm , EI= 0 (d =72 mm);
For F8 ES = +43µm ; EI= +16 (b =12 mm)
For f 87 es = - 16 µm ; ei = - 43 µm (b =12 mm);
Fora11 es = -380 µm ; ei = -600 µm (D = 82 mm);
for the internal diameter of the shaft we findd - d 1 =72- 67.4= 4.6mm = 4600 microns.
7) We build diagrams for the location of tolerance fields:
8) Let’s write down the symbol for the spline connection given in the problem with the corresponding fits.
Where b - type of centering; 10 - number of teeth; 72 - internal diameter of the connection. The landing is not indicated in the designation, since there is no tolerance field in the denominator; 82 - outer diameter of the connection;
Fit for outer diameter of connection; 12 - tooth width (splines);
Fit for slot width.
Let's write down the designations for the splined shaft and splined bushing separately
Bushing designation
In this designation, the internal diameter d = 72 mm is indicated by the tolerance field of the bushing H 11.
Shaft designation.
Type of gears - cylindrical, spur, uncorrected. Options : m =4, Z 1 = 60, Z 2 =35. Purpose: aircraft wheels.
1. According to the purpose of the gear transmission, we determine that tooth contact and lateral clearance are a group of indicators of smooth operation, which is of greatest importance for this transmission (see subsection 4.1 3).
2. Determine the degree of accuracy for the selected group of indicators according to the table. 24 5. From the same table we write down the peripheral speed.
The degree of accuracy for the smoothness group is 6, the peripheral speed is 15 m/s.
3. In this problem, for the accuracy and tooth contact groups we assign the same degrees of accuracy one lower than for the smoothness group, i.e., accuracy degree 7.
4. Based on the value of the peripheral speed, we determine the type of coupling, taking into account that the smallest lateral clearance is assigned for low-speed gears, and the largest for high-speed gears.
In this problem, the transmission is high-speed, because the speed is 15 m/s , Therefore, we choose the type of conjugation B
5. Using the table. 4.1, we will assign a tolerance for the lateral clearance and indicate the class of deviation of the center-to-center distance.
Side clearance tolerance -b, center distance deviation class -V.
6. Let us write down the designation for the accuracy of a cylindrical gear transmission:
7-7-6 B GOST 1643-81,
where 7 is the degree of accuracy of the contact of the teeth of the indicators; 7 - degree of accuracy of the accuracy group; 6 - degree of accuracy of the smoothness group; B - type of interface; b- side clearance tolerance.
7. For one group of smoothness indicators, which is of greatest importance for a given gear, we determine the standardized indicators. We write out the indicators according to tables 28 and 29 1. To do this, we need to calculate the dividing diameters of the two data in the wheel problem d 1 and d 2 ,width of each gear b 1 and b 2, center-to-center transmission distance a w. Let us set the width of the gear rim equal to 1/3 of the pitch diameter.
According to the table 28 5 determine the total contact patch along the height and length of the tooth, tolerances for parallelism f, axis misalignment f y and tooth tension F .
The total contact patch for the 6th degree of accuracy for the height of the teeth is not less than 50, for the length of the teeth is not less than 70.
To determine the following indicators, we calculate the pitch diameters d 1 And d 2 .
d 1 = mz 1 = 4 60= 240mm ;
d 2 = mz 2 = 4 35 = 140 mm
Gear ring width
b 1 = 1/3d 1 ;
b 2 = 1/3d 2 ;
b 1 = 80 mm ;
b 2 = 46,6 mm,
For 6th degree of accuracy f x 1 = 12 µm, f x 2 = 12 microns, f y 1 = 6.3 µm; f y 2 = 6.3 microns,
F 1 = 10 µm, F 2 = 10 µm.
According to the table 29 5 write down the values of the guaranteed side clearance j n min and deviations of the center distance f a. To do this, we calculate the interaxle distance.
Type of pairing IN, class of center distance V, its value equal to 190 mm, deviation of center distance f a = ± 90 µm, corresponds to guaranteed lateral clearance j n min = 185 µm.
Standards for smooth operation: kinematic error μm, tolerance for profile error μm, maximum step deviations μm.
5 .Calculation of dimensional chains
|
Nominal dimensions of component links, Ai, mm |
Closing link tolerance TA, µm |
Tolerance unit, i µm |
Tolerances of component links, TAi, µm |
Dimensions of links with deviations, mm |
||
|
Tabular |
Corrected |
|||||
A 1 =20A 2 =20A 3 =28A 4 =25A 5 =25A 6 =71A 7 =90 |
1.311.311.561.311.311.862.17 |
21212121213035 |
20 -0,0 2120 -0,0 2128 -0, 02125 -0, 02125 -0, 02171 -0, 0 4 690 -0, 03 5 |
Draw up a diagram of a dimensional chain indicating increasing and decreasing sizes. To do this, carry out an analysis and identify decreasing and increasing sizes.
Nominal dimensions, mm: ;; ; ; ; ; ; .
Distribution laws A 1 =3; A 2 =3; A 3 =2; A 4 =2; A 5 =1; A 6 =1; A 7 =1; A 8 =1.
Tolerance of the closing link TA = 240 µm.
1) We draw up a table in which we enter the dimensions of the links and the numerical values of the tolerance units of the component links
table 2 .
|
Nominal dimensions of component links, mm |
Tolerance of the closing link TA, µm |
Laws of distribution |
Tolerance unit i 2 , µm |
Tolerances of component links TA i, µm |
Dimensions of links with deviations, mm |
||
|
Tabular. |
Corrected |
||||||
2) The average accuracy coefficient is calculated using the formula
where is the average accuracy coefficient;
TA - tolerance of the closing link;
Coefficient corresponding to the distribution law;
Unit of tolerance.
1-for the law of normal distribution;
2-for the law of equal probability;
3-for the triangle law.
3) Denominator of the expression for A will look like this:
Substituting the tolerance values, we get
4) According to the average accuracy coefficient A we find the quality (see table 5.3 3). We choose 9th quality.
5) According to the quality and size of the links, we find the tolerances for the component dimensions (Table 5.4 3) and enter them into the table.
6) We check using the formula
The sum of the tolerances of the component links may be less than the tolerance of the closing link by 5 ... 6%, which is not fulfilled under these conditions.
We are making adjustments. To do this, we will assign tolerances according to quality 13 for dimensions A 4, A 5 and enter the values of these tolerances into the table. We check again.
The check showed compliance with the condition.
7) Let us enter the dimensions with deviations in Table 2 (except for the increasing link), using the following rule: we assign deviations for all covered dimensions (as for shafts) with tolerances of “minus”. These are the dimensions A 1 ... A 7
We calculate the deviations for the magnifying link A8. To do this, we determine the average deviations for reducing sizes from A1 to A7:
Where? With A - average size deviation; ES A i, - upper limit deviation of size; EI A i, - lower limit deviation of size.
The calculation is carried out taking into account the signs of deviations in microns:
8) For the closing link (A?), let’s set the upper deviation equal to the tolerance, and the lower one equal to 0. ES A? =TA? = 1300 µm; EI A? = 0. Then the average deviation for the closing link
The average deviation for increasing size A 8 is found by the equation
Where c Ay m . - the sum of the average deviations of the reducing links;
c A y m = (- 75)*2 + (- 125) + (-230)*2 + (- 175) + (-200) = -1110 µm;
c A 8 = - 1110 + 650 = - 460 µm.
9) The upper and lower deviations for increasing size A 8 are determined from the following equations:
E S A8 = c A8 + 1/2TA8; EI A8 = c A8 - 1/2TA8.
Take the tabular tolerance for A 8 from Table 2. Then
the calculated values of link deviations will be:
ES A 8 = - 460 + 1/2570 = -175 µm; EI A 8 = - 460 - 1/2570 = - 745 µm.
Let's write down size A 8 with calculated deviations in Table 2.
Tolerances calculated by the method of complete interchangeability are less stringent, i.e., the accuracy is lower than when calculating using the theoretical-probabilistic method.
Bibliography
1. Tolerances and landings: Handbook: In 2 hours / M.A. Paley, A.B. Romanov, V.A. Braginsky. -8th ed., revised. and additional -SPb.: Mechanical Engineering, 2001. - Part 1.
2. Tolerances and landings: Directory: In 2 hours / V.D. Myagkov, M.A. Paley, A.B. Romanov, V.A. Braginsky. -8th ed., revised. and additional -SPb.: Mechanical Engineering, 2001. - Part 2.
3. Metrology, standardization and certification: Guidelines for completing course work for students of technical specialties of a given form of study / Compiled by: Belik G.I., Pshenko E.B.; SibSAU.- Krasnoyarsk, 2003.
4. Metrology, standardization and certification: Handouts for course work for students of all forms of education / Compiled by: Belik G.I., Pshenko E.B.; SAA.-2002.
5. Standardization of accuracy in mechanical engineering. Collection of reference materials / Comp. G.I. Belik. - Krasnoyarsk: SAA, 1998..
Construction of the location of tolerance fields for various types of connections. Determination of the values of maximum deviations of dimensions, gaps and interferences, tolerances and fits. Selection of the tolerance range for the key and for the grooves, depending on the nature of the key connection.
test, added 06/03/2010
Calculation of fit parameters with a gap in the hole system. Limit dimensions, hole and shaft tolerances. Numerical values of maximum deviations. Designation of dimensions on working drawings. Layout of tolerance fields. Symbol of tolerances.
course work, added 06/30/2013
Analysis of standards for tolerances and fits of typical interfaces. Calculation of selective assembly of a cylindrical joint. Purpose of landings of rolling bearings, keyed, splined and threaded connections, dimensional chain. Means and control of connection accuracy.
course work, added 12/25/2015
Construction of the location of tolerance fields for three types of connections for the nominal size of a part - keyed, splined and profiled. Determination of maximum deviations of dimensions, gaps and interferences, as well as calculation of tolerances and fits of a suitable product.
test, added 10/04/2011
Basic concepts and definitions of tolerances and fits. Dependence of tolerance units on the qualification number. Formation and designation of tolerance and landing fields. Calculation of the dimensional chain by the maximum-minimum method and the probabilistic method of rolling bearings.
test, added 08/07/2013
Tolerances and fits of smooth cylindrical joints and gauges for monitoring their connections. Selection of rolling bearing fits. The concept of roughness, shape deviation and arrangement of surfaces. Straight-sided and involute spline and key connections.
test, added 12/19/2010
Tolerances and fits of cylindrical joints. Tolerances and fits of rolling bearings. Main dimensions of the bearing. Maximum deviations for the manufacture of bearing rings. Tolerances and fits of keyed joints. Tolerances and fits of spline joints.
test, added 06/28/2005
Details and precision of their connection. Tolerances of linear dimensions. Fittings of parts, their features and a full description of their characteristics. Calculation of tolerance units and definition of calculation formulas. Causes of machine errors and their prevention.
abstract, added 01/04/2009
Calculation and selection of fits for smooth cylindrical joints. Analogy method, interference fit calculation. Selecting tolerances and fits for complex connections. Requirements for the accuracy of dimensions, shape, location and surface roughness on the working drawing.
abstract, added 04/22/2013
Graphic design and specification of drawings of parts, assembly units and general appearance of the drive. Setting dimensions and their maximum deviations. Tolerances of shape and location of surfaces. Indication of heat treatment instructions on drawings.
Tolerances and fits of smooth cylindrical joints and gauges for monitoring their connections. Selection of rolling bearing fits. The concept of roughness, shape deviation and arrangement of surfaces. Straight-sided and involute spline and key connections.
Content
Designation Landing | Limit dimensions | Limit dimensions | Fit type | Fit tolerance | |||||||
Holes | |||||||||||
transitional | |||||||||||
Executive size of the passage side of the plug gauge:
Prmax= Dmin+Z+=34+0.0035+0.004/2=34.0055 mm;
the size in the drawing is 34.0055 -0.004 mm.
The standard size of the non-pass side of the plug gauge:
Notmax= Dmax- b +=34.025-0+0.004/2=34.027 mm;
the size in the drawing is 34.027 -0.004 mm.
Executive size of the passage side of the staple gauge:
Prmin= dmax-Z 1 - =34.068-0.0035-0.004/2=34.0625 mm;
the size in the drawing is 34.0625 +0.004 mm.
The standard size of the non-pass side of the staple gauge:
Notmin= dmin+ b 1 - =34.043+0-0.004/2=34.041 mm;
the size in the drawing is 34.041 +0.004 mm.
Executive size of control gauge:
K-Imax= dmax+ Y 1 - b 1 +=34.068+0.003-0+0.0015/2=34.07025 mm;
the size in the drawing is 34.0702 -0.0015 mm.
Executive size of the pass-through control gauge:
K-Prmax= dmax-Z 1 +=34.068-0.0035+0.0015/2=34.06525 mm;
the size in the drawing is 34.0652 -0.0015 mm.
Executive size of a no-go control gauge:
K-Hemax= dmin+ b 1 +=34.043+0+0.0015/2+0=34.04375 mm;
the size in the drawing is 34.0437 -0.0015 mm.
Roughness of working surfaces of calibers:
R a ? 0.012T size (H 1 ,H), H 1 =H=4 µm;
R a = 0.012?4 = 0.048 µm;
We accept R a from the standard series
For both calibers: R a =0.05 µm.
Figure 1.6 Schemes of tolerance fields of maximum calibers
2. Calculation and selection of bearing fits
Initial data:
bearing 409;
accuracy class 0;
radial force F=4000 N;
It is the inner ring that rotates.
1. Bearing parameters 409: d=45 mm; D=120 mm; B=29 mm; r=3.0 mm.
In the unit under consideration, the rotating ring is the inner ring of the bearing, so we fit it onto the shaft with an interference fit, and install the outer ring in the housing with a gap.
2. Determination of the minimum required interference for the inner ring of the bearing:
where coefficient k=2 for the heavy bearing series.
3. Determination of the maximum permissible tension of the inner ring of the bearing:
Using Table 9, we determine the maximum size deviations:
for hole: ES=0; EI=-12 µm;
for the shaft: es=+25 µm; ei=+9 µm;
5. Determination of the minimum and maximum interference in the connection:
Since >(9 µm > 4.522 µm), and >(37 µm< 205,2 мкм), можно заключить, что посадка внутреннего кольца подшипника выполнена правильно.
6. Select the fit for the outer ring of the bearing from the recommended ones: 120H7/l0. Limit deviations:
for hole:
for shaft:
Maximum clearance for selected fit:
S max =ES-ei=35-(-15)=50 µm.
Minimum clearance for selected fit:
Smin=EI-es=0-0=0 µm.
7. We build a diagram of the tolerance fields of the selected fits for the rolling bearing rings:
8. Sketch of the assembly unit
Figure 2.2 Assembly
3. Roughness, deviations in shape and location of surfaces
Initial data:
1. 45k6; Td=16 µm;
2.50n7; Td=25 µm;
3. 45k6; Td=16 µm;
4.25r7; Td=21 µm;
5. 53 -0.3; Td=300 µm;
6. 55 -0.3; Td=300 µm;
7. 18h6; Td=11 µm;
8. 9h15; Td=580 µm;
9.14N9; Td=43 µm;
3.1 We find the roughness of the marked surfaces in accordance with the purpose of these surfaces and the tolerance of their size
3.1.1 Determine the roughness for the seats of rolling bearings
Surface 45k6: Td=16 µm;
we take R a =0.63 μm from the standard series.
Surface 45k6: Td=16 µm
Similar to the previous surface R a =0.63 µm.
3.1.2 Roughness for critical surfaces that form certain fits with the mating surfaces of other parts
In the general case, the selected surfaces can be considered surfaces of normal geometric accuracy, for which the roughness parameter T .
Surface 50n7: Td=25 µm;
we take R a =1.25 µm from the standard series.
Surface 25r7: Td=21 µm;
we take R a =1.00 µm from the standard series.
Surface 18h6: Td=11 µm;
we take R a =0.32 µm from the standard series.
3.1.3 Determination of the roughness of surfaces that do not have high requirements
Surface 53 -0.3: Td=300 µm;
Surface 55 -0.3: Td=300 µm;
we take R a =12.5 µm from the standard series.
Surface 9h15: Td=580 µm;
we take R a =25 µm from the standard series.
The roughness of the keyway surfaces is assumed to be within the range R a =3.6...12.5 µm, with larger values corresponding to the bottom of the groove.
3.2 Tolerances for deviation of the shape and location of surfaces will also be determined using an approximate method
3.2.1 Calculation of tolerances for deviations from roundness and cylindricity of surfaces
Surface 45k6: Td=16 µm;
T µm, take T = 4 µm from the standard series.
T µm, take T = 4 µm.
Surface 50n7: Td=25 µm;
T µm, take T = 6 µm.
Surface 25r7: Td=21 µm;
T µm, take T = 6 µm.
3.2.2 Tolerance for radial runout of the surface relative to the AB surface
Surface 50n7:
T mm, take T =0.02 mm;
Surface 25r7:
T mm, take T =0.02 mm;
3.2.3 The tolerance for deviation from the perpendicularity of the surface end 50 -0.3 for fixing the bearing depends on the size tolerance for the width of the bearing
T µm, take T = 6 µm.
Tolerance for deviation from perpendicularity of the surface 9h15:
T µm, take T = 120 µm.
3.2.4 Tolerance for deviation from the symmetry of the keyway location
T µm, take T = 120 µm,
3.2.5 Tolerance for deviation from parallelism of the keyway
T // µm, take T // =120 µm.
where T B - when determining the perpendicularity tolerance, is the tolerance for the width of the bearing; when determining the tolerance for deviation from the symmetry of the sides of the keyway, this is the tolerance for the width of the shaft groove.
Draw a sketch of the shaft
4. Tolerances and fits of keyed and splined joints.
4.1 Keyed connections.
Initial data: d=35 mm, connection type 3 (tight connection).
According to GOST 23360-78, we select the main connection dimensions:
b=10 mm, h=8 mm;
The depth of the groove of the shaft and sleeve, respectively: t 1 = 5 mm, t 2 = 3.3 mm;
Type of execution 1;
Key length l=50 mm;
Key designation: Key 1-10 h 8 h 50 GOST 23360-78.
Application conditions - tight, characterized by the probability of obtaining approximately the same small interference in the connection of the keys with both grooves; assembly is carried out by pressing, used for rare disassembly and reverse loads.
For a given connection type, we assign tolerance fields for keyed connection parts:
shaft tolerance field s6,
hole tolerance H7,
key width tolerance range b - h9,
key height tolerance range h - h11,
tolerance range of key length l - h14,
tolerance range of groove width on the shaft and in the bushing - P9,
We determine the maximum deviations using the standard for smooth joints:
shaft diameter 35
sleeve diameter 35
key width 10
key height 8
key length 50
width of the groove on the shaft 10
groove width in sleeve 10
shaft groove depth
* sleeve groove depth
We build diagrams of the location of tolerance fields (Figure 4.1).
4.2 Straight spline connection
Initial data: b-6 h 28H11/ ? 26.7 h 32H12/a11 h7F8/js7 GOST 1139-80
Straight spline connection: centering along the side surfaces of the teeth b;
tolerance range of centering diameter D=32 mm
H12 - bushings,
number of straight-sided splines 6;
internal diameter of connection d=28 mm;
slot width b=7 mm,
bushing spline width tolerance range F8,
Shaft spline width tolerance range js7.
Centering along b is used when special alignment accuracy is not required, when transmitting significant moments, in cases where large gaps between the side surfaces of the shaft and bushing are unacceptable; the simplest and most economical way.
According to GOST 1139-80, we assign tolerance fields for the bushing and shaft according to the non-centering diameter:
H11 bushings,
maximum shaft deviation along the non-centering diameter d is not less than 26.7 mm.
Values of maximum deviations of diameters and widths of straight-sided splines:
For bushing b-6 h 28H11 h 32H12 h7F8 GOST 1139-80
centering diameter;
non-centering diameter;
groove width;
For shaft b-6 h? 26.7 h 32a11 h7js7 GOST 1139-80
centering diameter;
non-centering diameter mm;
groove width;
We build diagrams of the location of tolerance fields (Figure 4.2).
4.3 Involute spline connections
Initial data: 48 h H7/h6 h 2 GOST 6033-80
Nominal diameter D=48 mm,
Module m=2 mm,
type of centering along the outer diameter,
tolerance range of the outer diameter of the bushing D f - H7,
tolerance range of the outer diameter of the shaft d a - h6.
Centering along the outer diameter D is the most technologically advanced, since in this case, the final operation of the hole is broaching, and when processing the shaft, grinding is performed. This centering is used in parts with a non-hardened hole.
We determine according to GOST 6033-80 the missing parameters of the involute connection:
Number of teeth Z=22;
Pitch diameter:
Diameter of spline shaft grooves
Inner sleeve diameter
We assign a tolerance field for the bushing cavity width e - 9H, a tolerance field for the shaft tooth thickness S - 9d: fit 9H/9d.
The tolerance field of the bushing and shaft for non-centered diameter with a flat shape of the bottom of the cavity: for bushing D a - H11, for shaft d f - h16, fit H11/h16.
Values of maximum deviations of diameters, maximum deviations on the sides of the teeth:
For bushing 48 h H7 h 2 GOST 6033-80:
centering diameter;
depression width
e - 9H: ES=+71µm;
EJ e =+26 µm;
For shaft 48 h h6 h 2 GOST 6033-80:
centering diameter;
tooth thickness
S - 9d: es=-44 µm;
es e = -70 µm;
We build diagrams of the location of tolerance fields (Figure 4.3).
Literature
1. Markov N.N., Osipov V.V., Shabalina M.B. Standardization of accuracy in mechanical engineering: Textbook. for mechanical engineering specialist. universities / Ed. Yu.M. Solomentseva. - 2nd ed., revised. and additional - M.: Higher. school; Publishing center "Academy", 2001. - 335 pp.: ill.
2. Yakushev A.I. and others. Interchangeability, standardization and technical measurements: Textbook for colleges / A.I. Yakushev, L.N. Vorontsov, N.M. Fedotov. - 6th ed., revised. and additional - M.: Mechanical Engineering, 1987. - 352 p.: ill.
3. V.I. Anuriev "Handbook of mechanical engineering designer": in 3 volumes - 8th edition: - M.: Mechanical Engineering, 2001.
|
To download work you need to join our group for free In contact with. Just click on the button below. By the way, in our group we help with writing educational papers for free. A few seconds after checking your subscription, a link to continue downloading your work will appear. |
|
| Free estimate | |
| Promote originality of this work. Bypass Antiplagiarism. | |
|
REF-Master- a unique program for independent writing of essays, coursework, tests and dissertations. With the help of REF-Master, you can easily and quickly create an original essay, test or coursework based on the finished work - Standardization of accuracy in mechanical engineering. |
|
| How to write correctly introduction?
Secrets of the ideal introduction of coursework (as well as essays and diplomas) from professional authors of the largest essay agencies in Russia. Find out how to correctly formulate the relevance of the topic of work, define goals and objectives, indicate the subject, object and methods of research, as well as the theoretical, legal and practical basis of your work. |
|
higher professional education
"Altai State Technical University
named after I.I. Polzunov"
V.A. Wagner,
V.P. Zvezdakov,
V.V. Sobachkin
STANDARDING PRECISION IN MECHANICAL ENGINEERING
Tutorial
in the discipline "Metrology, standardization and certification"
Approved by the Educational and Methodological Association of Universities for University Polytechnic Education as a manual for students of higher educational institutions studying in mechanical engineering areas of training
From AltSTU
Barnaul – 2011
Vagner V.A. Standardization of accuracy in mechanical engineering. Textbook for the discipline “Metrology, standardization and certification” / V.A. Wagner, V.P. Zvezdakov, V.V. Sobachkin. - Barnaul: Publishing house Alt.gos.tekhn. University named after I.I. Polzunova. - 2011, 84 p.: ill.
The textbook provides information on the standardization of accuracy in mechanical engineering when developing machine parts and assemblies.
The purpose of the work is to study theoretical issues in the “interchangeability” section of the discipline “Metrology, standardization and certification”, to develop students’ independent activity skills to practically consolidate the tasks discussed in the theoretical part of the course, as well as work with reference literature and standards.
The textbook is intended for students of higher educational institutions of all specialties, studying in mechanical engineering areas of full-time, part-time and correspondence courses, studying the course “Metrology, standardization and certification”.
Reviewers:
Professor of the Department of Metrology and Interchangeability, MSTU. N.E. Bauman,
Doctor of Technical Sciences Pronyakin V.I.
Professor of the Department of Machine Parts, Ural Federal University,
Doctor of Technical Sciences Chechulin Yu.B.
1 Determination of the nominal dimensions of parts of an assembly unit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 General information about dimensions, tolerances, fits and maximum deviations. . . . . . . . . . . . . . . . . . . . . .
3 Tolerances and landings in the “Unified System of Tolerances and Landings”. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Choice of landings when designing structures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Landings with clearance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Transitional landings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Interference fits. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Calculation of interference fit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Tolerances and fits of keyed joints. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Connections with parallel keys. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Connections with segmental keys. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Tolerances and fits of gear (spline) connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Toothed connection with straight splines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Gear connection with involute splines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Fittings of rolling bearings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9 Dimensional chains. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Standardization of the accuracy of the shape and location of surfaces of typical machine parts, determination of the required surface roughness. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 Tolerances of shape and relative position of surfaces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Roughness of surfaces of parts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Tolerances for the location of the axes of holes for fasteners. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12 Justification of the technical requirements for the drawing of the assembly unit. . . . . . . . . . . . . . . . . . . . . . . . . . .
12.1 General provisions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2 Determination of technical requirements values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2.1 Determination of the values of lateral clearances in engagement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12.2.2 Determination of the completeness of contact of the mating side surfaces of the teeth. . . . . . . . . . . . . . . . . .
13 Instructions for drawing up technical requirements and preparing a working drawing of a gear. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13.2 Recommendations for drawing up technical requirements for spur and bevel gears. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14 Instructions for drawing up technical requirements and preparing a working drawing of the gearbox shaft
15 Recommendations for drawing up technical requirements, developing and designing a drawing of the bearing cover and cup. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliography. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix B. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
In accordance with the educational standard for students of technical specialties in mechanical engineering, studying the discipline “Metrology, standardization and certification” in the interchangeability section, a course work or calculation assignment is provided.
The purpose of the course work (calculation assignment) is to consolidate the knowledge gained from the theoretical course and acquire skills in their practical application, therefore this work provides both theoretical information on the main sections of the discipline and examples of solving typical course problems. The appendix to the work provides reference material necessary for solving problems.
Coursework is completed according to individual assignments issued by the teacher.
Requirements for the content and design of the course work (calculation assignment) are set out in the methodological recommendations.
1 Determination of the nominal dimensions of parts of an assembly unit
The dimensions of the parts that make up the assembly unit depend on the assignment and option for the course work. To determine their nominal values, it is necessary to calculate the scale factor. It is calculated as follows. In the drawing of the course work assignment, the size corresponding to the diameter of the shaft under the rolling bearing (d 3 measured) is measured. The target size (d 3 given) is divided by this measured size to obtain the scale factor μ
By measuring all other dimensions of the parts of the assembly unit and multiplying them by this scale factor, the calculated dimensions are determined.
To reduce the number of standard sizes of workpieces and parts, cutting and measuring tools, the values of nominal dimensions obtained by calculation must be rounded to the values specified in GOST 6636-69 “Normal linear dimensions” (Table A.1). After this, the rounded values of nominal sizes should be entered in Table 1.1. The dimensions associated with the rolling bearing should be taken according to the standard for this product, regardless of the design size. To do this, you should decipher the symbol of a given rolling bearing, determining its series, type and design features, and then, according to GOST 520-2002 or reference books, write down all the parameters of the rolling bearing necessary for further calculations (connecting diameter of the outer ring, width of the rings, dynamic load capacity of the bearing ).
Then the dimensions associated with the rolling bearing are assigned. These dimensions are size d 1 (fitting diameter of the through bearing cap), d 2 (diameter of the hole in the housing for installing the bearing), d 4 (inner diameter of the spacer sleeve), d 5 (fitting diameter of the blind bearing cap). Designations according to .
For example, if according to the assignment it is known that d 3 = 30 mm, bearing type 7300, then this means that the bearing size is 7306 (d 3 /5 = 30/5 = 6), tapered roller bearing and its outer diameter D = 72 mm . In accordance with this, the dimensions d 1 = d 2 = d 5 = 72 mm, and d 4 = d 3 = 30 mm.
When filling out Table 1.1, you should pay attention to the dimensions of standardized and standard parts, which must also be accepted in accordance with the relevant regulatory documents. Such parts include seals of bearing units, keys, round spline nuts, through and blind bearing caps, bearing cups.
Based on the obtained dimensions, an assembly unit is drawn on the appropriate scale.
2 General information about dimensions, tolerances, fits and maximum deviations
Size– numerical value of a linear quantity (diameter, length, etc.) in selected units of measurement. In the drawings, all linear dimensions are indicated in millimeters.
Actual size – element size established by measurement with permissible error.
Limit dimensions– two maximum permissible sizes, between which the actual size of a suitable part must be or can be equal to. The larger one is called the largest limit size, and the smaller one is called the smallest limit size. They are designated D max and D min for the hole and d max and d min for the shaft.
Nominal size– the size relative to which deviations are determined. The size indicated in the drawing is nominal. The nominal size is determined by the designer as a result of calculations for strength and rigidity or taking into account design and technological features. For parts forming a landing connection, the nominal size is common.
IN
Table 1.1 - Assembly unit dimensions
No.
Size designation
Dimensions measured, mm
Design size, mm
Size according to GOST 6636-69
1
. . .
. . .
. . .
. . .
2
. . .
. . .
. . .
. . .
n
. . .
. . .
. . .
. . .
upper deviation ES, es – algebraic difference between the largest limit and the corresponding nominal dimensions.
ES = D max – D - for hole, (2.1)
es = d max – d - for the shaft. (2.2)
Lower deviation EI, ei – algebraic difference between the smallest limit and the corresponding nominal sizes.
EI = D min – D - for hole, (2.3)
ei = d min – d - for the shaft. (2.4)
Actual deviation – algebraic difference between real and nominal sizes.
Tolerance T – the difference between the largest and smallest limit sizes or the algebraic difference between the upper and lower deviations.
T D = D max – D min = ES - EI - for holes, (2.5)
T d = d max – d min = es - ei - for the shaft. (2.6)
Tolerance is always positive. It determines the permissible dispersion field of the actual dimensions of suitable parts in a batch, that is, the specified manufacturing accuracy.
Tolerance field– a field limited by the largest and smallest limit sizes and determined by the tolerance value T and its position relative to the nominal size. In a graphical representation, the tolerance field is enclosed between two lines corresponding to the upper and lower deviations relative to the zero line (Figure 2.1).
Main deviation– one of two deviations (upper or lower), determining the position of the tolerance field relative to the zero line. The main one is the deviation closest to the zero line. The second deviation is determined through tolerance.
Zero line– a line corresponding to the nominal size, from which dimensional deviations are plotted when graphically depicting tolerances and fits.
Shaft– a term conventionally used to designate the external (male) elements of parts, including non-cylindrical elements.
Hole– a term conventionally used to designate the internal (encompassing) elements of parts, including non-cylindrical elements.
Hole tolerance denoted T D, and the shaft T d. In addition to female and male elements called holes and shafts, parts contain elements that cannot be attributed to either a hole or a shaft (ledges, distances between the axes of holes, etc.).
Landing- the nature of the connection of two parts, determined by the difference in their sizes before assembly. The fit characterizes the freedom of relative movement of the parts being connected or the degree of resistance to their mutual displacement. Based on the nature of the connection, three groups of fits are distinguished: fits with clearance, fits with interference, and transitional fits.
Gap S is the difference between the sizes of the hole and the shaft, if the size of the hole is larger than the size of the shaft. The gap allows relative movement of the assembled parts. The largest, smallest and average gaps are determined by the formulas:
S max = D max – d min = ES - ei; (2.7)
S 
Figure 2.1. a – pairing
b – diagram of the location of the tolerance fields of the shaft and hole
min = D min – d max = EI - es (2.8)
Lecture notes
by discipline
METROLOGY, STANDARDIZATION and certification
Part 1
NORMALIZATION OF ACCURACY PARAMETERS
Yegoryevsk 2014
Compiled by: _____________ L.S. Frantsuzova, Associate Professor of the Department of Automated Production Technologies
Lecture notes are intended for students studying in the following areas: 151900 Design and technological support of machine-building industries; 220700 Automation of technological processes and production; 280700 Technosphere safety. Discipline “Metrology, standardization and certification”.
Lecture notes were discussed and approved at a meeting of the educational and methodological group (UMG) of the TAP department
(protocol No. _____ dated _______ 2014)
Chairman of the UMG Department of TAP _________ A.A. Makhov
| 1.1. | Basic concepts of accuracy and types of accuracy used in mechanical engineering. | |
| 1.2. | Reasons for the appearance of errors in the geometric parameters of parts elements. | |
| 1.3. | Interchangeability. | |
| 1.4. | Standardization of dimensional accuracy | |
| 1.4.1. | The concepts of “shaft” and “hole”. | |
| 1.4.2. | Basic concepts of dimensions, deviations and tolerance | |
| 1.4.3. | Landings. Types of plantings and their characteristics. Graphic representation of tolerances and fits. | |
| 1.4.4. | Unified system of admissions and landings. (ESDP). | |
| 1.4.5. | Designation of tolerance fields, maximum deviations and fits on the drawings. | |
| 1.5. | Standardization of the accuracy of shape and location of surfaces | |
| 1.6. | Surface roughness. | |
| 1.6.1. | Basic concepts. | |
| 1.6.2. | Roughness parameters. | |
| 1.6.3 | Designation of surface roughness in drawings. | |
| 1.7. | Standardization of metric thread accuracy. Threaded connections. | |
| 1.7.1 | Basic concepts and classification of threads. | |
| 1.7.2. | Parameters of fastening metric threads. | |
| 1.7.3. | System of tolerances and fits with clearance of metric threads. | |
| 1.7.4. | Features of tolerance systems and interference fits and transition fits of metric threads. | |
| 1.8. | Tolerances and fits of keyed joints. | |
| 1.8.1. | Connections with parallel keys. | |
| 1.8.2. | Connection with segment keys. | |
| 1.9 | Tolerances and fits of spline joints. | |
| 1.10 | Tolerances and fits of rolling bearings. | |
| 1.10.1 | Accuracy of geometric parameters of rolling bearings. | |
| 1.10.2 | Selection of seating for rolling bearings. | |
| 1.10.3 | Symbols of bearings. | |
| 1.11 | Standardization of the accuracy of gears and gears. | |
| 1.11.1 | Main types of gears and gears. | |
| 1.11.2 | Tolerance system for cylindrical gears and gears | |
| 1.11.3 | Indication of the accuracy of wheels and gears. Design features of gear drawings. | |
| 1.12. | Calculation of tolerances of dimensions included in dimensional chains. | |
| 1.12.1 | Basic concepts and definitions. | |
| 1.12.2 | Calculation of the accuracy of dimensional chains. | |
| 1.13. | Bibliography |
BASIC CONCEPTS ABOUT PRECISION AND TYPES OF PRECISION USED IN MECHANICAL ENGINEERING.
Accuracy is the degree of approximation of the true value of a parameter, process, or object to its specified value.
The term "bias" is used to quantify accuracy. Error is the difference between the approximate value of a certain quantity and its exact value.
Any detail, even the simplest one, consists of several elements. Thus, a cylindrical roller consists of an element in the form of a cylindrical surface and two elements in the form of planes, the accuracy requirements of which are different. In mechanical engineering, requirements for the accuracy of the elements of a part, but sometimes the entire mechanism, are standardized.
Manufacturing an absolutely accurate part element is impossible, and it is not necessary:
a) depending on the purpose of the part element, the requirements for its accuracy must be different;
b) it is impossible to manufacture an element of a part absolutely accurately, even the simplest one;
c) the more accurately a part element needs to be manufactured, the more expensive its production will be;
In relation to parts elements in mechanical engineering, accuracy standardization is the establishment of requirements for the degree of approximation to a given value.
There are four standardized parameters characterizing the geometric accuracy of part elements:
1. Size accuracy.
The size of the elements of the parts must be within certain limits and differ from the nominal value by a certain value. Standardization of accuracy in relation to size consists of indicating deviations from the nominal value.
2. Accuracy of surface shape.
In mechanical engineering, part elements must have a certain nominal geometric shape (cylinder, plane, sphere, etc.). In this case, accuracy is normalized as the permissible distortion of the configuration compared to the ideal regular shape. These shape distortions must be within certain specified limits. Standardizing the accuracy of a form consists of indicating the values of how much a form may differ from the ideal, and sometimes the acceptable type of distortion is also normalized.
Fig.1.1. Distortion of the size and shape of the cylinder after manufacturing
3. Accuracy of surface location.
Any part consists of a set of elements (surfaces) of a certain shape. These elements must be located relative to each other in a given position. It is impossible to do this absolutely accurately, and therefore, there is a need to normalize the accuracy, i.e. the degree of deviation of the location of one surface relative to another. For example, in a cylindrical roller the end surfaces must be located perpendicular to the cylinder axis, but in practice this is impossible to do and therefore it is necessary to establish requirements for the accuracy of this location. When normalizing, it is necessary to indicate the permissible values, how much one surface can shift relative to another.
4.Accuracy in surface roughness.
After any type of surface treatment, the parts will have unevenness. Therefore, there is a need to normalize the accuracy in terms of the degree of approximation of the real surface to the ideal one with respect to small irregularities on these surfaces. Previously, the requirement for the height of surface irregularities was called the requirement for “surface cleanliness”, and now it is called the requirement for “roughness”. To standardize accuracy in relation to roughness means to establish acceptable values, mainly for the heights of irregularities on the surfaces under consideration.
INTERCHANGEABILITY.
Interchangeability- the property of independently manufactured parts and assembly units to ensure the assembly of products during manufacturing or the replacement of parts and assembly units of the same name during repair without the use of selection, fitting or adjustment; At the same time, it must be ensured that the finished product meets the requirements for it in terms of all quality indicators.
Substitutability that meets this definition is called complete. Full interchangeability is possible provided that the dimensions, shape, mechanical, electrical and other characteristics of parts and assembly units satisfy the specified technical requirements. It is economically feasible to use complete interchangeability for parts manufactured with tolerances no more precise than 6th grade, and in assembly units with no more than four mating dimensions. The interchangeability of parts and assembly units is achieved by manufacturing their elements according to all geometric and physico-chemical parameters within certain pre-standardized limits - tolerances.
The use of interchangeability principles has a number of advantages:
Significant reduction in labor intensity and clear regulation of assembly processes;
Possibility of widespread use of specialization and cooperation of production;
The possibility of widespread automation of manufacturing and assembly processes, organization of modern automated mass production based on advanced technology methods;
The ability to organize quick, cheap and easy repairs of products.
Along with using the method of complete interchangeability, methods are used incomplete interchangeability, based on probabilistic calculations; group interchangeability, based on preliminary sorting of parts into groups; regulation using structural compensators, as well as methods of direct selection or fitting of parts “in place”.
There are external and internal interchangeability.
External interchangeability– this is interchangeability in terms of the output data of the unit: its connecting dimensions or operational parameters. The principle of external interchangeability applies to purchased and cooperative products and assembly units. Signs of external interchangeability are performance indicators, dimensions and shape of connecting surfaces, for example in an electric motor - shaft speed and power, as well as dimensions of connecting surfaces; in rolling bearings - the outer diameter of the outer ring and the inner diameter of the inner ring and rotational accuracy.
Internal interchangeability- this is the interchangeability of parts included in a unit or units included in a product.
BASIC CONCEPTS ABOUT DIMENSIONS, DEVIATIONS AND TOLERANCE
Size- numerical value of a linear quantity (diameter, length, etc.) in selected units of measurement.
There are actual, nominal and maximum sizes.
Actual size– a size established by measurement using a measuring instrument with a permissible measurement error.
Measurement error refers to the deviation of the measurement result from the true value of the measured value. True Size- a size obtained as a result of manufacturing and the value of which we do not know.
Nominal size- the size relative to which the maximum dimensions are determined and which serves as the starting point for measuring deviations.
The nominal size is indicated in the drawing and is common to the hole and shaft forming the connection and is determined at the product development stage based on the functional purpose of the parts by performing kinematic, dynamic and strength calculations taking into account structural, technological, aesthetic and other conditions.
The nominal size obtained in this way must be rounded to the values established by GOST 6636-69 “Normal linear dimensions”. The standard, in the range from 0.001 to 20,000 mm, provides four main rows of sizes: Ra 5, Ra 10, Ra 20, Ra 40, as well as one additional row Ra 80. In each row, the dimensions vary according to the geometric profession with the following denominator values according to the rows: (A geometric progression is a series of numbers in which each subsequent number is obtained by multiplying the previous one by the same number - the denominator of the progression.)
Each decimal interval for each row contains the corresponding row number 5; 10; 20; 40 and 80 numbers. When establishing nominal sizes, preference should be given to rows with larger gradations, for example row Ra 5 should be preferred to row Ra 10, row Ra 10 - row Ra 20, etc. The series of normal linear dimensions are built on the basis of the series of preferred numbers (GOST 8032-84) with some rounding. For example, for R5 (denominator 1.6), values of 10 are taken; 16; 25; 40; 63; 100; 250; 400; 630, etc.
The standard for normal linear dimensions is of great economic importance, consisting in the fact that when the number of nominal dimensions is reduced, the required range of measuring cutting and measuring tools (drills, countersinks, reamers, broaches, gauges), dies, fixtures and other technological equipment is reduced. At the same time, conditions are created for organizing the centralized production of these tools and equipment at specialized machine-building plants.
The standard does not apply to technological interoperational dimensions and to dimensions related by calculated dependencies to other accepted dimensions or dimensions of standard components.
Limit dimensions - two maximum permissible sizes, between which the actual size must be or can be equal.
When it is necessary to manufacture a part, the size must be specified in two values, i.e. maximum permissible values. The larger of the two maximum sizes is called the largest limit size, and the smaller one - smallest size limit. The size of a suitable part element must be between the largest and smallest permissible maximum dimensions.
To normalize the accuracy of a size means to indicate its two possible (permissible) maximum sizes.
It is customary to denote nominal, actual and maximum dimensions, respectively: for holes - D, D D, D max, D min; for shafts - d, d D, d max, d mln.
By comparing the actual size with the limiting ones, one can judge the suitability of the part element. The validity conditions are the following ratios: for holes D min<D D
Deviation- algebraic difference between the size (limit or actual) and the corresponding nominal size.
To simplify the setting of dimensions in the drawings, instead of the maximum dimensions, maximum deviations are indicated: upper deviation- algebraic difference between the largest limit and nominal sizes; lower deviation - algebraic difference between the smallest limit and nominal sizes.
The upper deviation is indicated ES(Ecart Superieur) for holes and es- for shafts; the lower deviation is indicated El(Ecart Interieur) for holes and ei- for shafts.
According to definitions: for holes ES=D max -D; EI= D min -D; for shafts es=d max –d; ei= d mln -d
The peculiarity of deviations is that they always have a sign (+) or (-). In a particular case, one of the deviations may be equal to zero, i.e. one of the maximum dimensions may coincide with the nominal value.
Admission size is the difference between the largest and smallest limit sizes or the algebraic difference between the upper and lower deviations.
The tolerance is indicated by IT (International Tolerance) or T D - hole tolerance and T d - shaft tolerance.
According to the definition: hole tolerance T D =D max -D min ; shaft tolerance Td=d max -d min . The size tolerance is always positive.
The size tolerance expresses the spread of actual dimensions ranging from the largest to the smallest limiting dimensions; it physically determines the magnitude of the officially permitted error in the actual size of a part element during its manufacturing process.
Tolerance field- this is a field limited by upper and lower deviations. The tolerance field is determined by the size of the tolerance and its position relative to the nominal size. With the same tolerance for the same nominal size, there may be different tolerance fields.
For a graphical representation of tolerance fields, allowing one to understand the relationship between nominal and maximum dimensions, maximum deviations and tolerance, the concept of a zero line has been introduced.
Zero line is called a line corresponding to the nominal size, from which the maximum deviations of dimensions are plotted when graphically depicting tolerance fields. Positive deviations are laid upward, and negative deviations are laid down from it (Fig. 1.4 and 1.5)
Rice. 1.5. Layout of shaft tolerance fields
The smaller the tolerance, the more accurately the part element will be manufactured. The larger the tolerance, the rougher the part element. But at the same time, the smaller the tolerance, the more difficult, complex, and hence more expensive the production of a part element; The greater the tolerances, the easier and cheaper it is to produce a part element.
SURFACE ROUGHNESS.
BASIC CONCEPTS.
Surface roughness called a set of surface irregularities with relatively small steps, identified using the base length.
The microroughnesses under consideration are formed during the machining process by copying the shape of cutting tools, plastic deformation of the surface layer of parts under the influence of the processing tool, its friction against the part, vibrations, etc.
The surface roughness of parts has a significant impact on wear resistance, fatigue strength, tightness and other performance properties.
Surface roughness in the form of a profilogram in Fig. 1.44.
 |
Rice. 1.44. Surface profilogram
To separate surface roughness from other irregularities with relatively large steps (shape deviations and waviness), it is considered within a limited area, the length of which is called the base length L. The base length L is normalized depending on the roughness parameters within the range: 0.01; 0.03; 0.08; 0.25; 0.8; 2.5; 8; 25, i.e. the more micro-irregularities, the longer the base length.
The line on which the set of surface irregularities stands out is called the baseline. The base line is a line of a given geometric shape, drawn in a certain way relative to the profile and used to evaluate the geometric parameters of surface irregularities. The appearance of this line depends on the type of surface of the part element. Thus, the base line of the surface of a part element has the shape of a line of a nominal profile and is located equidistant to this profile.
The average line is used as a baseline when assessing surface irregularities, which is the basis for measuring profile deviation.
ROUGHNESS PARAMETERS.
1. Arithmetic mean deviation of profile Ra- arithmetic mean of the absolute values of profile deviations within the base length:

where l is the base length;
n is the number of selected profile points along the base length;
y is the distance between any profile point and the center line (profile deviation).
2. Height of profile irregularities at ten points Rz- the sum of the average absolute values of the heights of the five largest protrusions of the profile and the depths of the five largest depressions of the profile within the base length:
![]() or
or ![]()
where Himax, Himin are determined relative to the midline;
h jmax , h imin - relative to an arbitrary straight line parallel to the center line and not intersecting the profile.
3. Maximum height of profile irregularities R max - distance between line
profile protrusions and a line of profile depressions within the base length.
4. Average pitch of profile irregularities S m - arithmetic mean value
pitch of profile irregularities within the base length:
where S mi is the pitch of profile irregularities, equal to the length of the segment of the center line, enclosed between the points of intersection of adjacent protrusions and depressions of the profile with the center line.
5. Average pitch of profile irregularities along vertices S- average
step value of profile irregularities at the vertices within the base length:
where S i is the pitch of the profile irregularities, equal to the length of the segment of the center line enclosed between the projections onto it of the highest points of two adjacent local protrusions of the profile.
6. Relative reference length of profile t p - ratio of the reference length of the profile to the base length:
where h p - profile reference length- the sum of the lengths of the segments cut off at a given level in the profile material by a line equidistant to the center line t within the base length.
Of the listed roughness parameters, the parameters Ra and Rz are most often used. The Ra parameter is preferable, since it is determined from a significantly larger number of profile points than Rz. The use of the Rz parameter as a control parameter is largely determined by the methods of measuring the parameters under consideration. Ra values are predominantly measured using instruments equipped with diamond stylus probes. Determining Ra on rough surfaces is associated with the risk of breaking the diamond needle, and on very smooth surfaces - with low reliability of the results due to the fact that the radius of the tip of the needle cannot detect very small irregularities. Therefore, Rz is recommended to be used for roughness heights of 320...10 and 0.1...0.025 microns, in other cases - Ra.
When calculating critical moving and press connections, it is necessary to take into account the parameter Rz, whereas in the drawings in most cases the Ra values are specified. In these cases, you can use the dependency
Where K=4 at R a =80...2.5 µm; K=5 at Ra=1.25…0.02 µm.
Table 1.3 Correspondence of the numerical values of Ra, Rz, Rmax to the numerical values of the base length
| Ra, µm | Up to 0.025 | 0,025-0,4 | 0,4-3,2 | 3,2-12,5 | 12,5-100 |
| Rz, µm | Up to 0.1 | 0,1-1,6 | 1,6-12,5 | 12,5-50 | 50-400 |
| L, mm | 0,25 | 0,8 | 2,5 |
For rubbing surfaces of critical parts, parameters Ra (or Rz), t p are assigned and the direction of irregularities is specified, for surfaces of cyclically loaded parts - R max, S m (or S) and the direction of irregularities, for connections with interference - only Ra (Rz). For non-critical parts, you can not indicate the roughness parameters, in which case it is not subject to control.
Table 1.4 Types of direction of roughness irregularities.
| Types of roughness direction | Schematic illustration | Symbol |
| Parallel | ||
| Perpendicular | ||
| Crossed | ||
| free | ||
| Circular | ||
| Radial | ||
| Spot |
ON THE DRAWINGS.
Roughness designation on drawings establishes the designations of surface roughness and the rules for applying them on product drawings.
Three symbols are used to indicate roughness:
When designating roughness only by parameter, a sign without a shelf is used.
The values of all roughness parameters are indicated after the corresponding symbol, and the height parameters Ra, Rz, Rmax are indicated in micrometers, the step parameters Sm, S - in millimeters, the shape parameter t p - in percentages.
1. Signs indicating the requirements for surface irregularities - roughness are located (Fig. 1.46):
a) on the contour lines of the part elements,
b) on extension lines, as close as possible to the dimension line,
c) on the shelves of lines - callouts,
d) on dimension lines or on their extensions if there is not enough space, and it is allowed to break the extension line.
2. Signs indicating roughness requirements and having a shelf must be located relative to the main inscription of the drawing (stamp), as
indicated in Fig. 1.47.
4. If the requirements for surface roughness are the same for all elements of the part, then the roughness sign is applied once and placed in the upper right corner of the drawing, and is not applied to the surfaces of the elements of the part (Fig. 1.48).
This means that surfaces on which the roughness requirement is not specified are not processed according to this drawing at all, i.e. these surfaces will have the unevenness that the workpiece has.
Signs that indicate roughness requirements and placed in the upper right corner of the drawing must have dimensions and line thickness approximately 1.5 times larger than the signs applied directly to the surface of the part,
 Rice. 1.50 Rice. 1.50 |
6. When the surface of a part element has little space to place a sign, it is allowed to apply a simplified designation to surface irregularities (Fig. 1.) with an explanation of this designation in the technical requirements on the detail drawing.
7. When the surface of a part is a contour, for example a polyhedral figure, and the requirements for surface irregularities must be the same, then the roughness mark is applied once.
THREADED CONNECTIONS.
BASIC CONCEPTS AND CLASSIFICATION OF THREADS.
A threaded connection is the connection of two parts using a thread, i.e. elements of parts having one or more evenly spaced helical thread projections of constant cross-section formed on the side surface of a cylinder or cone.
The cross-sectional contour of grooves and projections in a plane passing through the thread axis, common to external and internal threads, is called a thread profile.
Classification of threads.
Various conditions for using threads have led to a variety of their types according to design features and purpose.
· Depending on the shape of the surface on which the threads are formed:
Cylindrical; - conical threads;
· According to the section profile (i.e., depending on the type of figure in the section), threads are divided into:
 Rice. 1.51. Rice. 1.51. |
Triangular (Fig. 1.51 a)
Trapezoidal (Fig. 1.51 b)
Sawtooth (Fig. 1.51 c)
Round (Fig. 1.51 d)
Rectangular (Fig. 1.51 d)
by number of visits:
Single pass; - multi-pass
· in the direction of the turns:
Right; - left;
· by unit of measurement of linear quantities
To metric; - inch.
· According to their purpose, threads are divided into general purpose and special threads.
TO general purpose include fastening, kinematic, pipe and reinforcement.
Mounting threads used for detachable fixed connections of machine parts. Their main purpose is to ensure the strength of the joints and maintain the tightness (non-opening) of the joint during operation.
Kinematic threads used for moving connections in screw-nut type gears (lead screws and caliper screws of metal-cutting machines, screws of measuring instruments, screws of presses, jacks, etc.).
Pipe and reinforcement threads having a triangular profile, they are used for pipelines and fittings with the main purpose of ensuring the tightness of connections.
To threads special purpose These include those that are used only in certain products of certain industries (for example, threads for bases and sockets of electric lamps, backlash-free threads in lead screws of jig boring machines, etc.).
General requirements are complete interchangeability, those. ensuring unconditional screwability of parts forming a threaded connection when manufactured independently without adjustment or selection, and reliable performance of prescribed operational functions.
METRIC THREADS.
The basics of this system of tolerances and fits, including degrees of accuracy, accuracy classes of threads, normalization of make-up lengths, methods for calculating tolerances of individual thread parameters, designation of accuracy and fits of metric threads on drawings, control of metric threads and other issues.
Degrees of accuracy and classes of thread accuracy.
A metric thread is determined by five parameters: average, outer and inner diameters, pitch and thread profile angle.
Tolerances are assigned only for two parameters of an external thread (bolt); middle and outer diameters and for two parameters of internal thread (nut); middle and inner diameters. For these parameters, for metric threads, degrees of accuracy are set to 3... 10 (Table 1.5).
Table 1.5. Degrees of accuracy of external and internal thread diameters.
| Type of thread | Thread diameter | Degree of accuracy |
| Outdoor | d 2 | 3,4,5,6,7,8,9,10 |
| D | 4,6,8 | |
| Internal | D 2 | 4,5,6,7,8,9 |
| D 1 | 4,5,6,7 |
In accordance with established practice, accuracy levels are grouped into 3 accuracy classes:
accurate (3-5 degree of accuracy),
average (5-7 degree of accuracy),
rude. (7-9 degree of accuracy),
The concept of accuracy class is conditional. When assigning degrees of accuracy to an accuracy class, the make-up length is taken into account, since during manufacturing the difficulty of ensuring a given thread accuracy depends on the make-up length available to it.
Installed three groups of make-up lengths:
S - short ( less than normal)
N - normal ( make-up length from 2.24Pd 0.2 mm to 6.7Pd 0.2 mm),
L - long(more than normal).
WHEELS AND GEARS.
Each of the operational groups is characterized by its main indicator of accuracy. Yes, for counts gears, the main accuracy requirement is kinematic accuracy; For high speed - smooth operation; For heavily loaded low-speed- completeness of contact teeth; For reversible(especially reference ones) - limiting the size and fluctuations of the side clearance.
Taking into account the operating conditions, the tolerance standards for gear and worm gears establish accuracy standards:
- Kinematic accuracy,
- smooth operation;
- tooth contact;
- side clearance.
According to manufacturing accuracy, all gears and gears are divided into 12 degrees.
Smooth transmission operation
This transmission characteristic is determined by parameters, the errors of which appear many times (cyclically) per revolution of the gear wheel.
The cyclic nature of errors that disrupt the smooth operation of the transmission, and the possibility of harmonic analysis, made it possible to determine and normalize these errors according to the spectrum of the kinematic error.
Under the cyclic transmission error f zkor(Fig. 1.72, A) And gear wheel f zkr(Fig. 1.72, b) understand the double amplitude of the harmonic component of the kinematic error of the gear or wheel, respectively. To limit the cyclic error, the following tolerances are established:
□ f zok - for cyclic transmission error;
□ f zk - on the cyclic error of the gear.
 Rice. 1.73 Rice. 1.73 |
To limit the cyclic error with a repetition frequency equal to the frequency at which the teeth engage f zzor And f zzr Tolerances have been established for the cyclic error of tooth frequency in the transmission f zzo And f zz . These tolerances depend on the frequency of the cyclic error (equal to the number of gear teeth z), the degree of accuracy, the axial overlap coefficient ε β and the modulus T.

The meaning of life is related to the question “What to live for”, and not to the question of how to maintain life. A person's attitude is...

A mushroom is a living organism that forms a separate kingdom of the same name. For a long time they were classified as part of the plant kingdom. But in...

For lovers of “quiet” hunting, mushroom season begins in early summer and lasts until late autumn. And rarely do they...
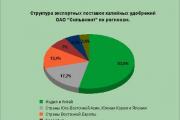
Aleshnikova, V.I. Use of professional consultants. - M.: Infra-M, 1999. - 240 p. 2. Beich, E....

Orange juice. The symbolic meaning of orange juice in dream books is pleasure and temptation. Quite often we...
We most often overcome all kinds of difficulties encountered along the path of life. Of course, for this we make...

This year your patron Neptune will be in your constellation and this is a good sign, because you will...
1993 who? 1993 is the year of which animal? — According to the Chinese horoscope, 1873, 1933, 1993 belonged to the years of the Black...

Wave-particle duality of light means that light simultaneously has the properties of continuous...

The role of biology is enormous in our world. Although it is not one of the priority subjects, most schoolchildren and...
Amines are organic derivatives of ammonia containing an NH 2 amino group and an organic radical. In general...

How to answer questions in Part BThe second part of the social studies work consists of 7 tasks with a short answer....
Form TORG-15 is drawn up in the case when during transportation, movement between and within the warehouse, when...

Nutritionists say that for good health and a slim figure, you must include snacks in your...

A mushroom is a living organism that forms a separate kingdom of the same name. For a long time they were classified as a kingdom...

For lovers of “quiet” hunting, mushroom season begins in early summer and lasts until late autumn. And rarely do they...